系所概况:
以推动陕西省机器人产业发展为导向,开展智能机器人前沿技术探索研究,推动智能机器人与材料科学、信息科学、生命科学和环境科学等前瞻领域的交叉,促进智能机器人在相关领域的实际应用,实现智能机器人科学研究与应用技术的协调并重发展。
师资队伍:
机器人与智能系统研究所现有37名教师,包括教授15人、博士生导师24人,师资力量雄厚、梯次合理。梅雪松教授是我国智能制造和机器人重大项目专家组成员,网络协同制造和智能工厂重点专项专家组成员;陈贵敏教授是我国柔顺机构领域活跃专家,担任国际权威期刊ASME J Mech Robot副主编;张小栋教授长期从事智能检测、诊断与控制以及智能机器人技术方面的研究与教学工作,担任中国振动工程学会理事、动态测试专业委员会常务副主任,全国高校机械工程测试技术研究会常务副理事长,英文SCI期刊IntelServ Robot、J MechSciTechnol编辑和中文核心EI期刊《振动、测试与诊断》常务编委等;胡桥研究员从事水下(仿生)机器人及智能感知技术等国防科研工作10余年,担任中国造船工程学会、中国仪器仪表学会等理事以及《水下无人系统学报》编委。
课程教学:
课程名称 |
授课教师 |
学分 |
机械设计基础 |
陈贵敏 |
4 |
TRIZ创新设计研究 |
朱爱斌 |
2 |
概念设计研究 |
朱爱斌 |
2 |
机器人学 |
徐海波 |
2 |
机械系统集散控制 |
陶涛 |
2 |
精密成形技术 |
苏文斌 |
2 |
精密机械学基础 |
王晶(小) |
2 |
现代模具设计及制造 |
苏文斌 |
2 |
Bio-mechatronicsTechnology |
张小栋 |
2 |
现代测试技术及仪器应用 |
张小栋 |
2 |
机械工程测试技术 |
张小栋 |
3 |
电活性功能材料与结构导论特性与应用 |
李博 |
2 |
数控机床精度测量及误差补偿 |
陶涛,姜歌东 |
2 |
创新思维和机器人创客实践 |
朱爱斌 |
3 |
机械制图 |
史晓军 |
3 |
汽车电子与控制 |
张政 |
2 |
教学成果:
机器人与智能系统研究所教师们获国家级教学成果二等奖(梅雪松教授、陈花玲教授、徐学武研究员、许睦旬教授、张小栋教授等),主编教材20余部。
本研究所共有四个团队:
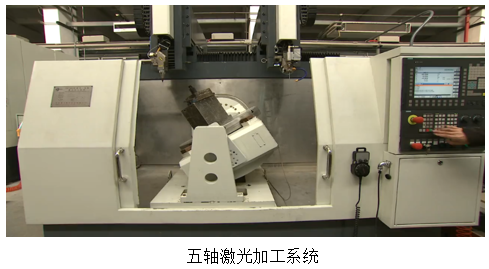
团队1:激光装备团队
激光装备团队以激光精密加工基础理论、关键技术、高端装备为主要研究方向,团队现有教师10人,包括教授4人,副教授1人,助理教授4人,高级工程师1人,博士生导师5人,目前在读博士20余人,在读硕士60余人。近年来,承担了包括国家重点研发计划、973计划、863计划、国家自然科学基金重点项目、国防预研等国家级、省部级项目30余项,校企联合横向课题10余项,团队在研项目总经费超3000万元;获陕西省高等学校科学技术一等奖1项;发表SCI/EI论文100余篇,授权发明专利近30项,成果应用于西航、商发、中电38所、航天六院等龙头企业,相关研究成果成功孵化激光智能制造企业。
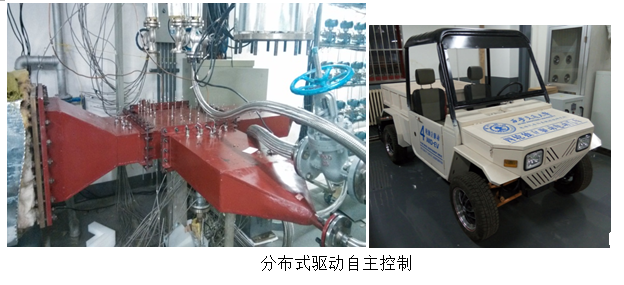
团队2:智能系统团队
智能系统团队以智能工厂和智能机器人基础理论与关键技术为主要研究方向,是支撑陕西省智能机器人公共科技服务平台和西安交大机器人创新研究院的重要科研和教学实体,团队现有教师13人,包括教授4人、副教授3人、副研究员1人、高工1人、助理研究员4人,博士生导师5人、硕士导师7人。团队目前在读博士近20人,在读硕士人60余人。近年来,承担了包括国家重点研发计划、国家科技重大专项、973计划、863计划、国家自然科学基金重点项目等国家级、省部级项目38项,校企联合横向课题20余项,项目额超1.9亿元;获得国家级教学成果奖1项,陕西省教学成果奖1项;获得省部级科技技术一等奖5项;发表SCI/EI论文300余篇,授权发明专利40余项。指导学生获国际级、国家级机器人大赛一等奖和二等奖10余项。相关研究成果孵化移动机器人企业一家,所研制的消杀机器人在抗击新冠疫情中发挥了重要作用。
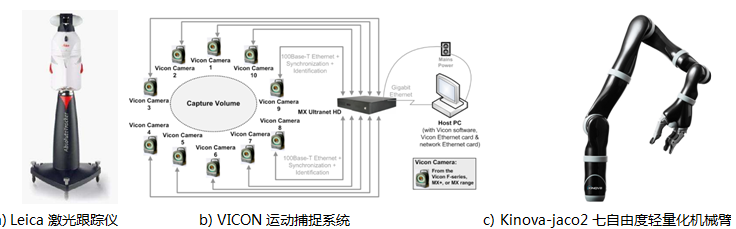
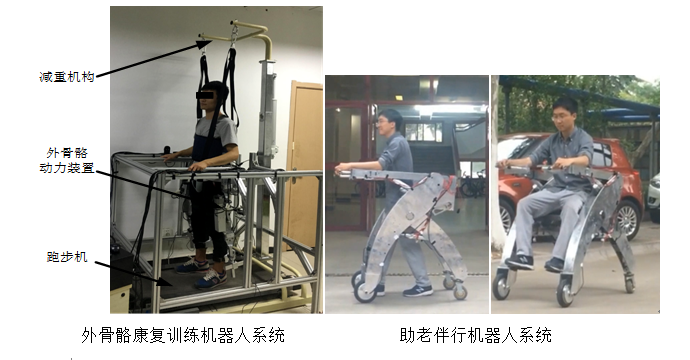
团队3:生机电融合与服务机器人团队
本团队聚焦生机电融合理论、方法与技术,提出“脑控技术”和“多元输入-多元输出脑认知模型”工程科学技术问题,研究脑-肌电与光纤多源感知、脑控、肌电控、人机交互和协同控制的理论和方法,开展助老、助残、助行、巡检、救援等服务机器人关键技术研究,积极谋求相关机器人样机成果转化,并促成其在重点行业的应用系统开发和示范应用。另外,针对国际上超能勇士概念,提出了超能机器人学的学术理念,开展其基本理论与关键技术研究。
研究方向包括:脑肌多源感知、人机交互及医学康复机器人,环境智能感知、机器学习及移动服务机器人,自主导航控制、多机协同及智能巡检机器人,光纤精密感知、监测诊断及机器人检测技术。
研究特色和内容包括:通过研究人体运动意图的精密感知理论与方法、多信息融合的机器视觉与智能人机交互、机器人运动路径规划与行为自主决策,实现人机运动的动态协同,开展多种服务机器人的关键技术研究与其原型样机的开发。研究内容主要包括:多信息融合的机器视觉与智能人机交互;机器人运动路径规划与行为自主决策;人-机器人交互理论研究与应用;精密感知、深度学习理论与实现;感知功能一体化神经控制假肢研究与实现等。
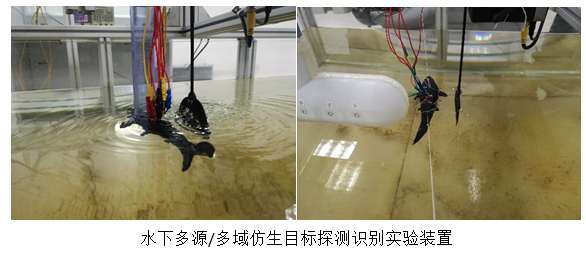
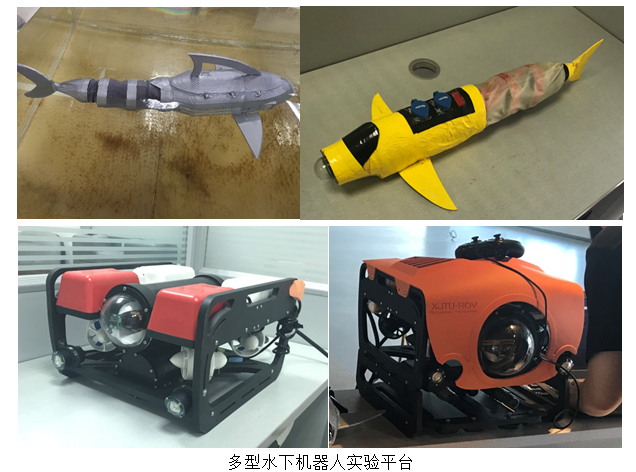
团队4:刚-柔-软复合机器人技术团队
综合运用智能材料、柔性结构和刚体机构,结合仿生设计,研究刚柔软复合机器人的设计与实现,面向复杂深腔作业、海洋资源开发利用、医疗康复器械、航空航天等应用领域,开展仿生驱动与感知、精密传动、刚度调控、水下操控、4D打印、重构与拟态、以及机器人系统研发等。
实验条件:








研究环境:


科研成果:
近三年近3年,共发表论文99篇,共授权发明专利84项,共获省部级一等奖4项,承担国家级科研项目28项,省部级项目11项,其他项目22项,经费共计1.48亿元。
省部级奖项列表
序号 |
奖励类别 |
项目名称 |
完成人 |
获奖等级 |
1 |
教育部高等学校科学研究优秀成果科学技术进步奖 |
数控机床动态误差分析关键技术应用 |
梅雪松、姜歌东、陶涛、张东升、赵飞等 |
一等奖 |
2 |
中国机械工业科学技术奖 |
高端包装印刷装备技术及系列产品开发 |
梅雪松,许文才,陈邦设等 |
一等奖 |
3 |
高等学校科学研究优秀成果自然科学奖 |
机械装备的复合故障智能诊断理论与方法 |
雷亚国,訾艳阳,何正嘉,胡桥 |
一等奖 |
部分项目课题列表
序号 |
名称及编号 |
起止时间 |
经费(万元) |
1 |
国家重点研发计划“航空航天复杂构件表面的激光精细制造工艺与装备”(2016YFB1102500) |
2016.07-2020.06 |
4645 |
2 |
国家重点研发计划“飞秒激光微创手术机器人系统”(2019YFB1311600) |
2020.01-2022.12 |
1089 |
3 |
国家重点研发计划项目“激光高性能连接技术与装备”(2017YFB1104900)子课题 |
2017.07-2021.06 |
492 |
4 |
陕西省科技统筹创新工程计划项目“大负载长航时高层消防空中机器人研发与应用”(编号:2016TZC-G-12-3) |
2016.01-2018.12 |
150 |
5 |
广东省科技计划项目“高速抗扰工业机器人专用伺服控制技术研究及应用”(2015B010917002) |
2015.04-2017.12 |
500 |
6 |
国家科技重大专项“数控机床误差测量、分析与补偿技术”(2015ZX04005001) |
2018.01-2020.12 |
834 |
7 |
陕西省科技统筹创新工程计划项目“工业机器人谐波减速器系列化研发及应用示范”(2015KTZDGY-02-01) |
2015.09-2018.09 |
150 |
8 |
国家重点研发计划“面向功能替代的多模运动信息融合与识别技术研究”(2017YFB1300303) |
2017.12-2020.11 |
680 |
9 |
陕西省科技统筹创新工程计划项目“多功能助老伴行服务机器人关键技术研究及产业化应用” (2015KTZDGY-05-01) |
2015.8-2017.12 |
100 |
10 |
国家重点研发计划“负重及搬移托举助力外骨骼机器人关键技术研究及典型应用验证”(2017YFB1300505) |
2017.12-2020.11 |
144 |
国际交流



2020年举办相关会议:
1.2020中国机构与机器科学会议(第22届)
http://iafe.xjtu.edu.cn/info/1009/6401.htm
2.全国高等学校制造自动化研究会第十九届学术年会
http://iafe.xjtu.edu.cn/info/1009/6408.htm
3.第十届国际电气电子工程师学会自动化、控制和智能系统中的网络技术国际学术会议
http://iafe.xjtu.edu.cn/info/1009/6409.htm
招生就业:
机器人与智能系统研究所每年招收研究生110人左右,其中包括硕士生近90人,博士生20余人,均在机器人与智能系统研究的相关领域开展工作,毕业后部分前往国内外知名高校和研究所进一步学习或工作,部分进入国内骨干或外资性企业,从事与专业相关的工作。
更新日期:2022年6月16日
